
Integrating Attention into Planning for Deep Robot Navigation
Description
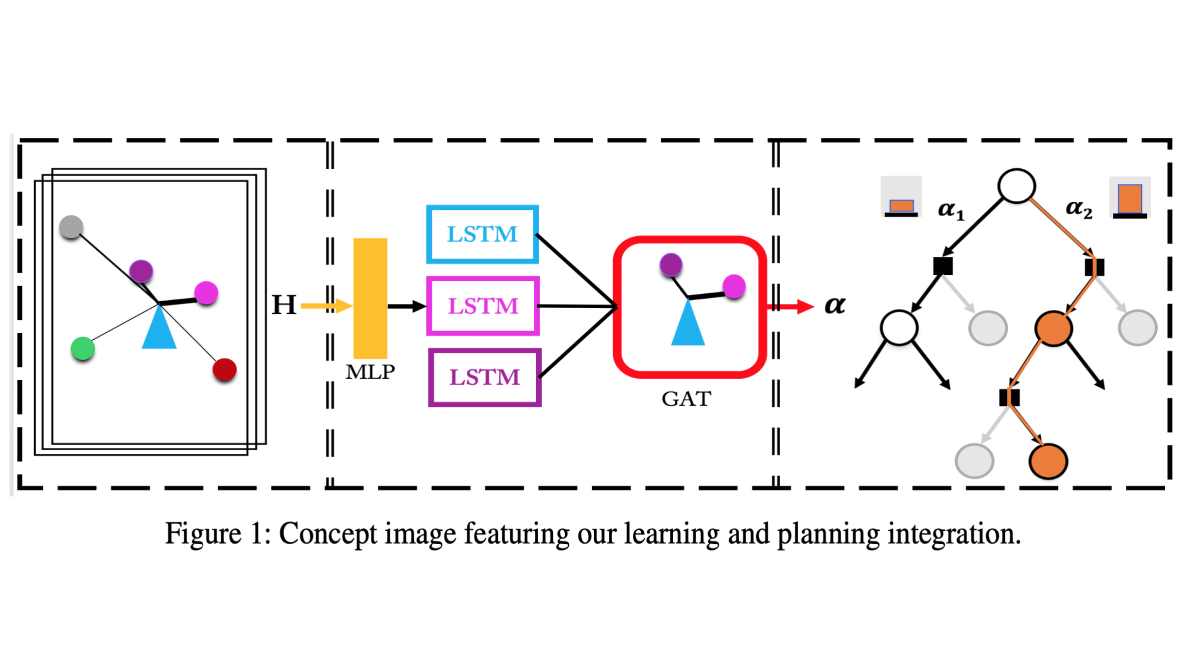
In merging on a highway or rounding a traffic-circle, humans identify other vehicles based on selective attention—filtering out the irrelevant vehicles to spend precious cognitive resources on the relevant. In this work, we introduce a principled approach for learning attention weights for motion planning under uncertainty. We train a custom graph neural network (GNN) model on labels derived from a model-based planner (Gamma). This approach allows us to learn a context-dependent probability distribution over vehicles to filter monte-carlo simulations for forward planning. In doing so, we demonstrate compelling results: reduced collision rates and faster travel times in simulation while under real-time decision-making constraints (< 50 milliseconds).